近日,自动化工程学院2022级本科生张兴宇同学连续在控制国际顶级会议IEEE Conference on Decision and Control(CDC)与机器人国际顶级会议IEEE International Conference on Robotics and Biomimetics(ROBIO)上发表学术论文。自动化工程学院本科生张兴宇为第一作者,彭知南副教授为通讯作者。该研究成果依托电子科技大学人机智能技术与系统教育部工程研究中心完成,聚焦人机智能理论、人机集群智能与协同等前沿方向。
论文一:Optimal Robust Containment Control for Human-Quadrotor Formation via Critic Neural Network Learning with Relaxed PE Conditions
面向无人机集群协同作业等复杂应用场景,该论文提出了一种基于评价神经网络的人在环最优鲁棒合围控制一体化框架(如图1),解决了外部扰动下有人类意图干预的集群编队围合控制问题,突破了传统方法对 PE 条件的严苛要求,兼顾了编队控制的鲁棒性与最优性,提升人机协同下无人集群编队协同的环境适应能力与机动性能,为多智能体协同控制的工程落地突破了关键理论瓶颈。
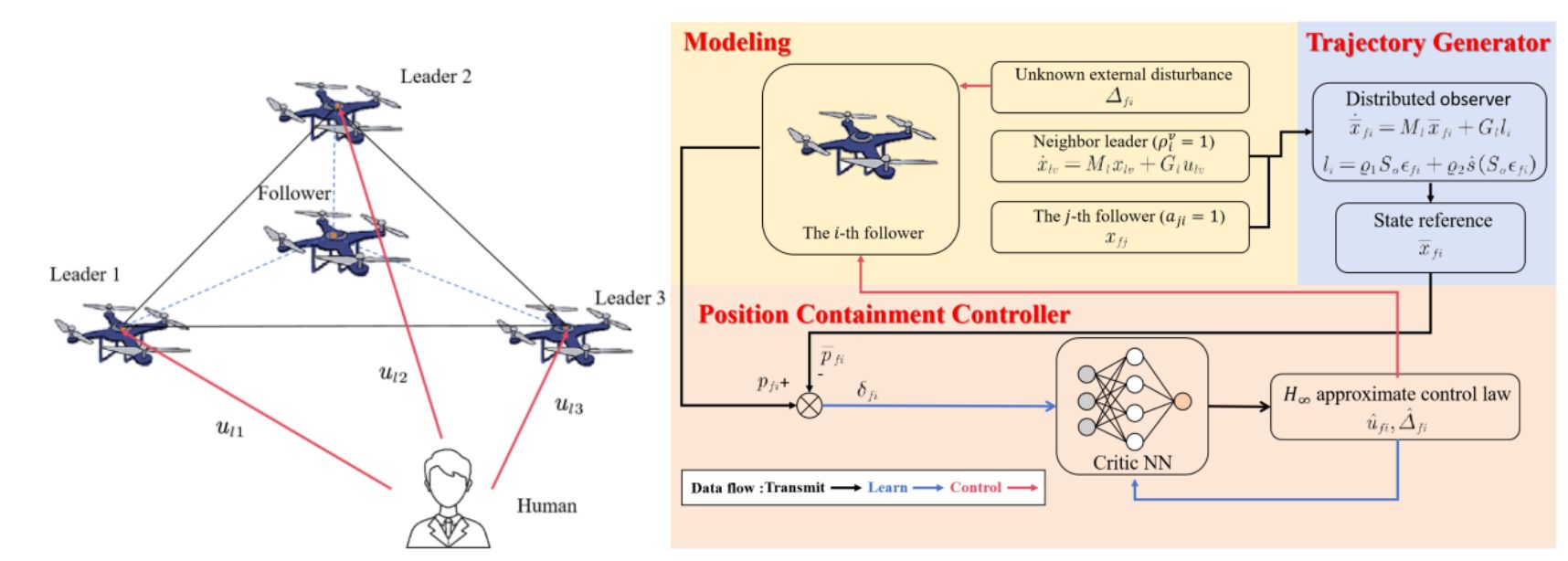
图1 人类控制指令下的四旋翼无人机集群的合围控制器
论文二:PGSC: A Shared Control Framework for Trajectory Adaptation in pHRI via Human Motion Prediction and Cooperative Game Theory
面向物理人机交互中的轨迹自适应这类复杂应用场景,该论文提出了一种基于人体运动预测与合作博弈论的人机共享控制(PGSC)框架(如图2),解决了未知障碍物规避过程中人机冲突的核心问题,突破了传统共享控制方法仅依赖当前人体指令、预测模型易发生灾难性遗忘的技术局限,兼顾了轨迹跟踪的精度与人机协作的主动性,提升了机器人在非结构化环境下的自适应作业能力,为物理人机交互中轨迹自适应控制的工程实现突破了关键理论与技术瓶颈。
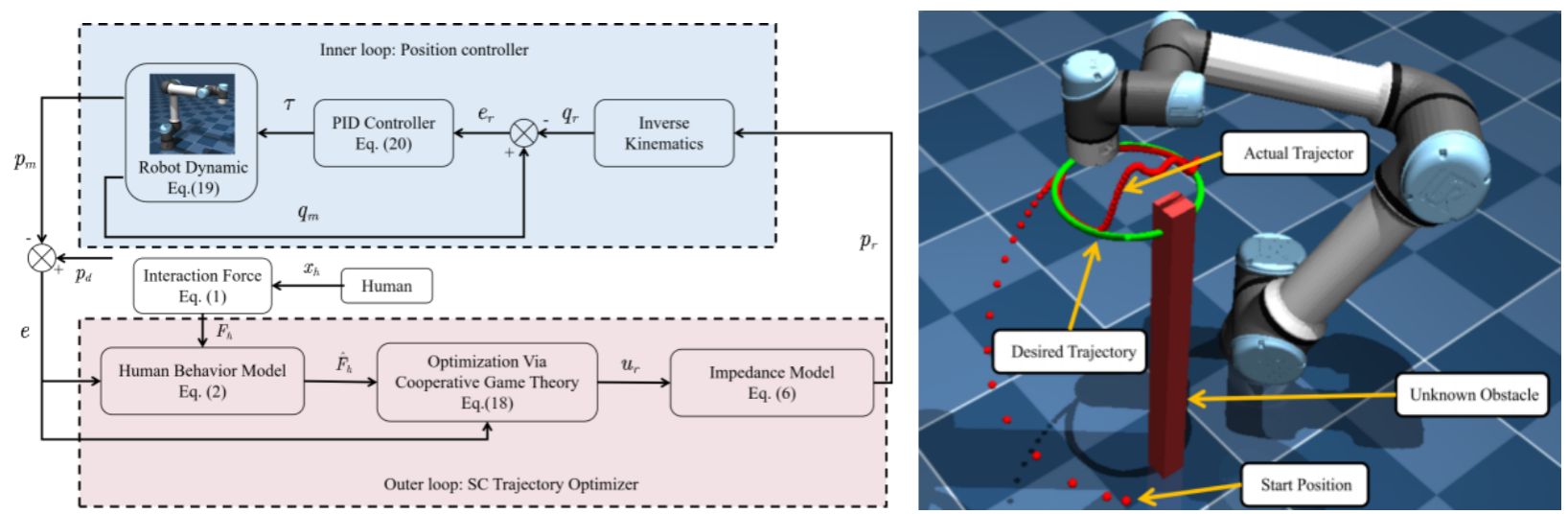
图2 基于人类运动预测和合作博弈论的人机共享控制框架
IEEE Conference on Decision and Control(CDC)由IEEE控制系统学会(IEEE CSS)主办,是全球控制领域的顶级旗舰会议,与美国控制会议(ACC)并称控制学科两大核心会议,代表该领域理论与工程应用的最高水平。会议聚焦决策与控制的基础理论、系统设计及跨领域融合,覆盖最优控制、鲁棒控制、自适应控制、多智能体协同、人机交互控制等核心方向,是连接控制理论突破与航空航天、机器人、无人系统等工程落地的关键学术平台。
IEEE International Conference on Robotics and Biomimetics(ROBIO)由IEEE机器人与自动化学会(IEEE RAS)主办,是全球机器人与仿生学领域的顶级会议,以“机器人技术与仿生学深度融合”为核心特色。会议聚焦仿生机器人、软体机器人、集群机器人、智能导航、人机协作、医疗康复机器人等前沿方向,尤其关注AI赋能下的仿生智能与非结构化环境适应性,为机器人领域的跨学科创新与工程转化提供了高水平交流平台,是该领域具有重要国际影响力的学术盛会。

图3:张兴宇同学在会场进行oral学术报告
上述研究工作依托人机智能技术与系统教育部工程研究中心,中心负责人为机械与电气工程学院院长程洪教授。该团队目前在人机智能理论、集群智能、康复机器人、认知康复等方面有成熟的技术基础和丰富的实践经验,所突破的关键技术均具有完全自主的知识产权。《物理紧耦合人机系统关键技术及其应用》项目在2017年荣获中国人工智能学会“吴文俊人工智能科技进步一等奖”,所研制的下肢助行外骨骼机器人于2018年取得国内首批CFDA注册证,填补了国内产品空白,打破了国际技术壁垒,已达国际先进水平。此外,中心研制的移动机器人和人机共驾系列产品,在国内相关领域产生示范应用,达到国内领先水平。中心目前建有省级平台5个,校企平台2个以及行业联盟3个。已发表与录用论文合计300余篇,申请国家发明专利300项,其中授权150项,30项已转化并实现产业应用。此外,中心承担及完成了包含国家973计划项目、国家重点研发计划在内的国家级重点项目10余项,省部级重点项目20余项。
论文链接:
论文一:https://ieeexplore.ieee.org/abstract/document/11376053
论文二:https://ieeexplore.ieee.org/abstract/document/11312683

