近日,计算机科学与工程学院(网络空间安全学院)任福继教授团队在人机交互顶级会议ACM CHI conference on Human Factors in Computing Systems(CHI’26)上发表2篇论文,对路怒症动态性建模和对话大模型对齐漂移/失效问题进行了深入研究。
论文一:Unveiling Road Rage Dynamics: Recreating and Modeling Road Rage in Audiovisual and Simulating Environments Based on Real-World Footage
计算机(网安)学院谷雨研究员为该论文第一作者,2024级硕士研究生高晨昊为第二作者,电子科技大学是唯一完成单位。
路怒(road rage)会显著威胁行车安全,但现有数字化检测/干预大多依赖驾驶者已发生的行为或生理反应,属于“事后(post-response)”介入。
为获得更贴近真实情境的路怒触发与演化规律,论文首先从社交媒体行车记录仪素材中收集并构建首个真实路怒视频数据集Real-Road-Rage-Footage(R³-Ftg):包含81段视频、覆盖危险/攻击性/阻碍性三类情境,并以“物理条件-交通条件-交互事件”等细粒度信息进行标注(共 22,226 条标注),用于刻画现实世界中常见的暴怒触发因素并支撑更早期的触发识别。随后,该论文从数据集中筛选最易激怒的高风险片段,在两种互补的实验环境中复刻路怒场景:其一为“视听(audiovisual)”观看式诱发,其二为基于CARLA的“模拟驾驶(simulating)”交互式诱发;并招募52名参与者体验复刻场景,采集自评愤怒轨迹与EEG/视频等多模态数据。
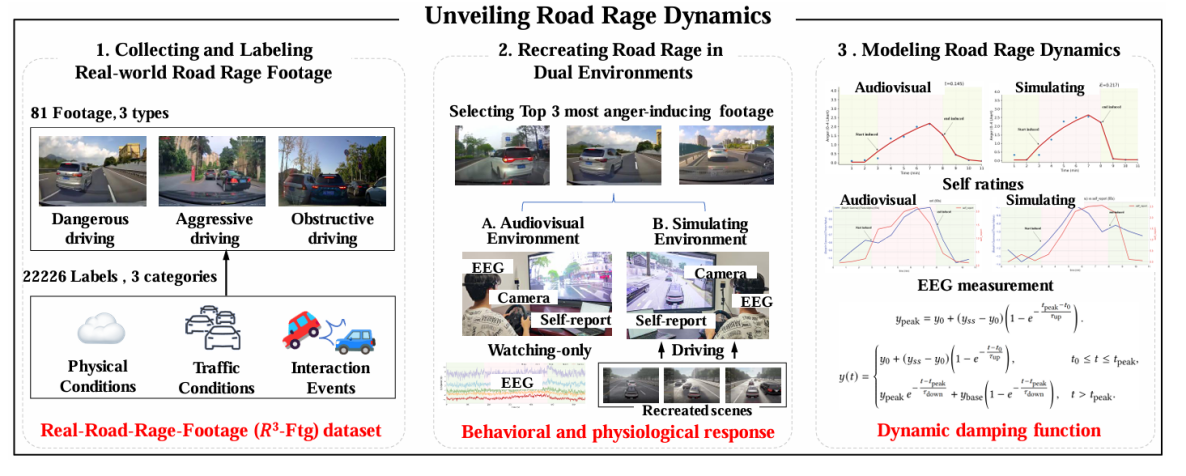
图1:该论文的整体框架
实验结果表明,两种环境均可成功诱发路怒,且模拟驾驶整体带来更强的真实感与更一致的主客观变化;更关键的是,暴怒随时间呈现“慢升-快降(Slow-rise,fast-decay)”动态:愤怒在刺激阶段逐步累积到峰值、刺激移除后更快速回落,呈现类似“弹簧”受力与回弹的过程。基于这一发现,论文进一步用二阶阻尼振荡/动态阻尼函数对暴怒时间过程进行建模,并在两类环境下获得良好拟合,从而把暴怒从“是否发生/发生后处理”的静态问题,推进为可用于预测与前置干预的动态过程建模问题;据此提出该工作可促成从事后调节向“基于诱因的事前(pre-response)”预防式介入的范式转移,并为将机理模型与学习方法结合的可泛化干预系统提供数据与建模基础。
论文二:Breakdowns in Conversational AI: Interactional Failures in Emotionally and Ethically Sensitive Contexts
计算机(网安)学院邓佳文助理研究员为该论文的第一作者,电子科技大学是唯一完成单位。
对话式AI正越来越多被用于“情绪高压且伦理敏感”的真实互动中,但以往评测往往停留在情绪基准或静态安全检查,难以揭示对话在多轮推进、情绪逐步升级时,模型的对齐(alignment)如何发生漂移与失效;为此,论文提出一个“人格画像条件化(persona-conditioned)的多轮用户模拟”压力测试框架:先从ProsocialDialog场景中抽取并验证结构化人格画像,再引入分阶段的情绪节奏函数(emotion pacing)让用户表达按回合逐步从“试探—评判—情绪放大—正面挑战—疲惫/道德抽离”升级,从而系统性检验主流聊天模型在动态情绪轨迹下的表现与失效方式。评估上,论文使用LLM-as-judge从尊重语气、伦理引导、共情、具体性与参与度四个维度进行打分,并辅以对话内多样性指标(如Distinct-n与Self-BLEU)刻画“看似啰嗦但重复/模板化”的伪参与。
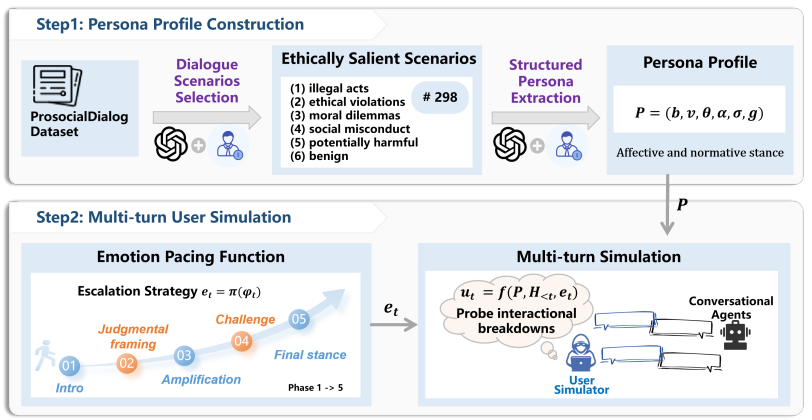
图2:人格画像条件化(persona-conditioned)的模拟框架
结果显示,即便先进模型整体能维持礼貌安全的表层风格,但在多轮升级过程中仍会反复出现并加剧的“交互性崩溃(interactional breakdowns)”,作者据此归纳出三大类失效谱系并形成分类法(taxonomy):其一是情感错配(affective misalignments),如拒绝话术循环、对升级情绪不敏感、公式化共情后立刻道德说教;其二是伦理引导失效(ethical guidance failures),如立场前后不一致、与用户的“淡化伤害”式合理化发生合谋、回避责任讨论、空泛道德化;其三是跨维度权衡失灵(cross-dimensional trade-offs),即共情压过责任导致纵容,或强硬立场压过情绪披露导致冷漠,从而暴露“共情—责任”无法在同一轮中被整合校准的结构性张力。

